Increasingly flexible production processes mean that the flow of goods is also being re-imagined – and realized by AGVs. Automated guided vehicles enable complex transport tasks to be completed efficiently in factory buildings and logistics areas without rigid material flow solutions. Ideally, the AGVs navigate completely freely to their destinations, independently avoiding obstacles and stopping safely in front of any people that suddenly appear.
Safety must therefore be top of the agenda for AGVs. Nothing would be more fatal for AGV manufacturers and operators than if people were injured through contact with the vehicle. Collisions with machines or hazardous goods could also result in significant damage. AGVs must therefore satisfy specific safety requirements in terms of control, navigation, braking, and speed monitoring. The corresponding requirements in the industrial sector are defined in DIN EN ISO 3691-4 “Driverless industrial trucks and their systems”. The standard also specifies the required performance level for monitoring functions, operating modes, and brake control.
AGVs must therefore satisfy specific safety requirements in terms of control, navigation, braking, and speed monitoring.
To meet the safety requirements, the components of an AGV should be able to be integrated into different solutions as simply as possible. This requires the support of industry standards and, above all, extensive safety features that are already embedded in the components themselves. The drive concept of an AGV plays an essential role here, enabling the vehicles to be configured cost-effectively and as simply as possible.
Safety role of the drive solution
As far as the safety of an automated guided vehicle is concerned, the safety controller and laser scanners for monitoring its surroundings play a central role. However, any actions must then be implemented ‘safely’ via the drives. Safety-critical factors such as braking capacity, speed, steering angle and loading weight are interdependent and must be taken into account when executing AGV maneuvers.
In order to be able to trigger these safe states via the safety controller when required, the drive technology must be able to handle safety commands. In practice, however, drives with no bus interfaces or the associated safety protocol are typically used, which means that additional safety encoders have to be installed. For reasons of redundancy, a second signal is always necessary for moving axles. These safety encoders for monitoring the direction of travel and the safe speed of the drive cost money, take time and effort to integrate, and use up valuable installation space.
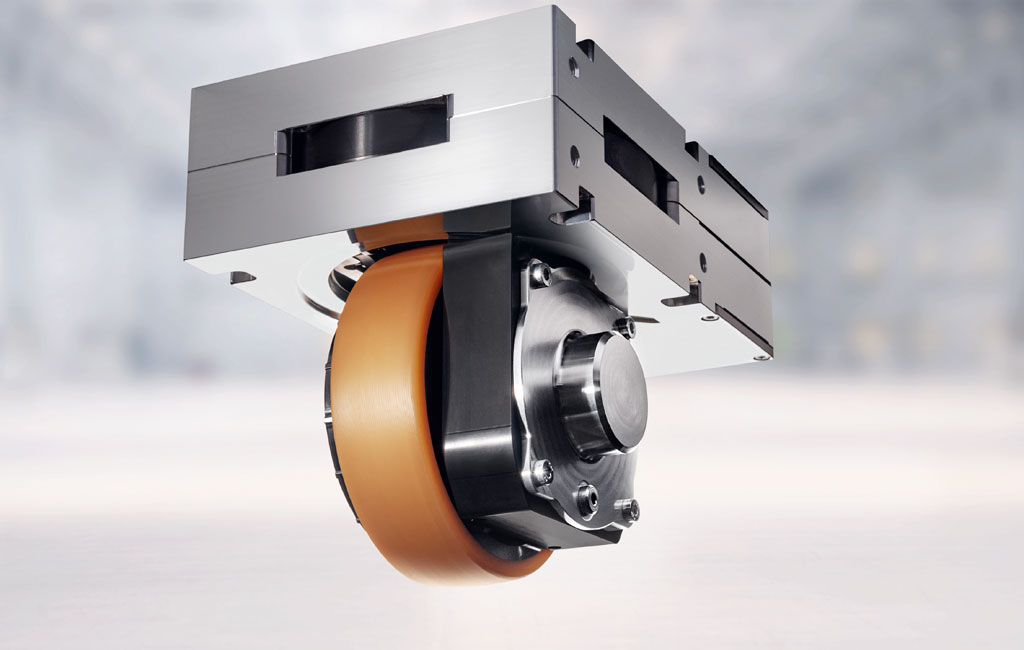
The ArgoDrive driving/steering system from ebm-papst for AGVs is a unit consisting of motors, special transmissions, sensors and all the necessary connections, and it allows for free-range navigation. (Graphic: ebm-papst)
For this reason, ebm-papst has already integrated the necessary components for implementing a redundancy-based safety concept in its compact drive solution ArgoDrive. This driving/steering system combines propulsion and steering functions in a single assembly and has the necessary sensors and all necessary connections. Every ArgoDrive – designed to make it very easy to implement AGVs with omnidirectional maneuverability – already has redundant encoder systems.
In addition to the motors’ hall sensors, an additional second encoder provides the required redundancy to reliably detect the exact speed. An encoder system designed for redundancy is also available for determining the steering angle. This means that the ArgoDrive already provides the most important fundamentals for generating safety signals for the higher-level safety control of AGVs. As a result, AGV manufacturers can save themselves increased integration effort with separate encoders, for example, in order to record the steering angle of a slewing ring and the safe speed. Thanks to the available MTTFd values from the sensors, the achievable performance level can also be calculated using common tools.
The ArgoDrive already provides the most important fundamentals for generating safety signals for the higher-level safety control of AGVs.
In order to offer AGV manufacturers maximum freedom in the choice of safety controller, the most important commercially available communication standards must be supported. This is why with the ArgoDrive, ebm-papst offers support for CANopen as well as EtherCAT or integration into the Siemens control environment with Profinet.
Safe stop
In an emergency, an AGV must come to a halt within a short distance that is appropriate for the relevant situation. Of course, if the braking characteristics of the AGV are poorer, the protective field detected by the safety scanners can be increased, but the operational efficiency and competitiveness of the vehicle is then significantly reduced.

AGVs can be equipped with two, three or four ArgoDrives, depending on the required performance and weight class. (Graphic: ebm-papst)
Regardless of the size of the protective field, the drive system must reliably execute the safe stop command in the event of danger. In this situation, high braking power is key. The ArgoDrive can initiate immediate emergency braking as well as controlled motor deceleration at up to 2.5 m/s2. The mechanical emergency braking torque is 60 Nm, while the motor can decelerate with up to 30 Nm. The mechanical brake is also used as a holding brake, for example, to secure damaged AGVs against unintentional rolling away, even on ramps.
In the event of emergency braking, an AGV with four ArgoDrives installed will consequently come to a standstill even faster than with two units plus support wheels – because the braking torque of all four drives is available. This is where a significant advantage of this solution becomes apparent, as an AGV can be realized with just one ArgoDrive thanks to its combined driving and steering functionality.
With just two ArgoDrives, the AGV offers full omnidirectional maneuverability. And with four drive units, not only can the possible transport weight be scaled up, but also, as mentioned, the maximum braking deceleration. Even if the power supply to the entire vehicle fails, the ArgoDrive goes into a safe stop to prevent uncontrolled movements. The desired safe state is thus reached.
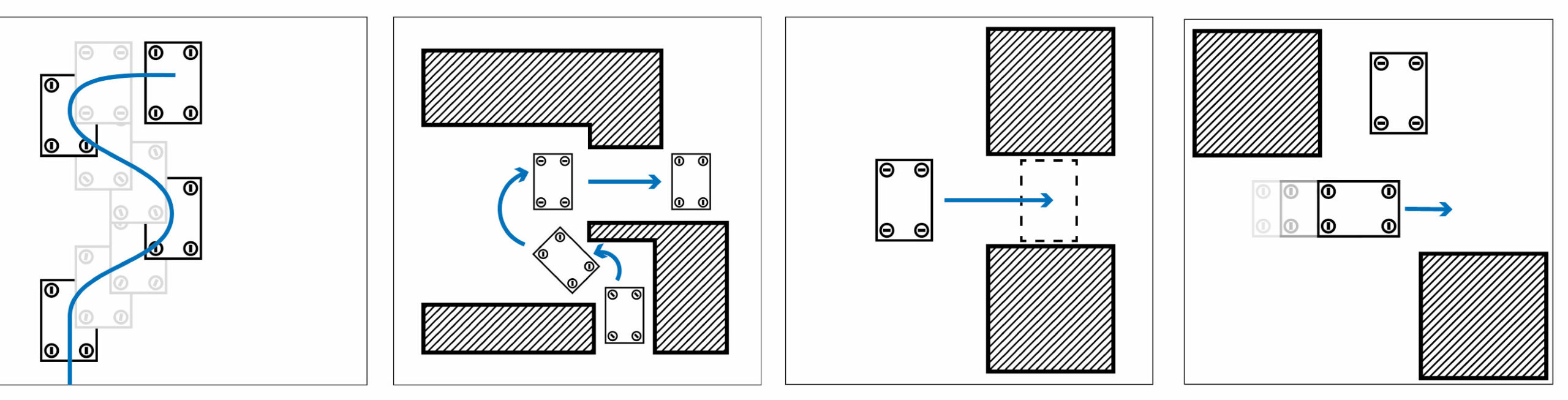
Omnidirectionality for AGVs with ArgoDrive
 The ArgoDrive from ebm-papst is a new solution for AGVs, combining propulsion and steering functions in a single assembly. This unit consists of motor, transmission, omnidirectional steering, sensors and all the necessary connections. Thanks to a superposition gear, its two motors contribute to steering, acceleration, movement and braking, depending on requirements.
The ArgoDrive from ebm-papst is a new solution for AGVs, combining propulsion and steering functions in a single assembly. This unit consists of motor, transmission, omnidirectional steering, sensors and all the necessary connections. Thanks to a superposition gear, its two motors contribute to steering, acceleration, movement and braking, depending on requirements.
The infinite steering angle enables space-saving, free-range vehicle movement – even from a stationary position. One ArgoDrive per axle already guarantees full omnidirectionality. Depending on the required size of AGV and the weight of the goods to be moved, three or four driving/steering systems can also be installed. ebm-papst offers its ArgoDrive in Light, Standard, and Heavy versions for payloads of up to 100, 300 or 500 kg per wheel, respectively, in order to meet every requirement for moving masses, braking, and mastering inclines in a scalable way. With four Heavy versions, a total vehicle weight of up to two tons is then possible. Consistent gearbox dimensions across all sizes with standardized mounting points and uniform, high-quality plug connections allow the AGV to be adapted to project-specific requirements within minutes.
In addition to a high braking deceleration, the drive must also easily tolerate a large number of emergency stops without any restrictions on functionality. In the event of an emergency stop, the ArgoDrive mechanically decelerates the wheel to a maximum via a brake pad. For the vast majority of braking operations, however, the electromotive deceleration of 2.5 m/s2 is always sufficient, because the deceleration performance of an AGV is matched to the size of the protective fields set for normal driving speed. The safety controller only initiates emergency braking if objects or people suddenly breach the narrow protective field in front of the AGV, where highly dynamic real-time monitoring takes place.
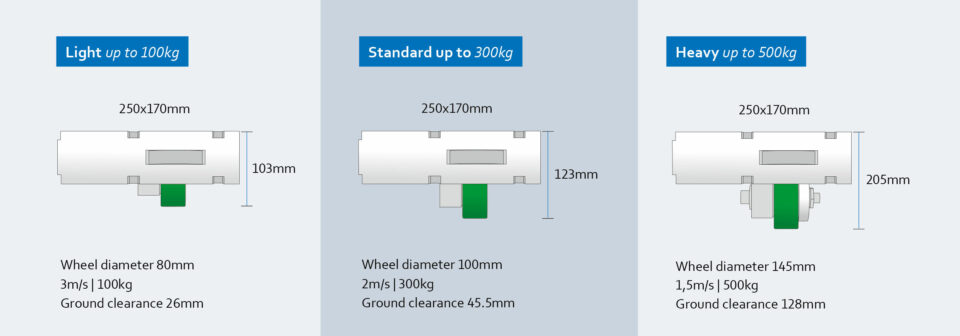
ebm-papst offers the ArgoDrive in Light, Standard and Heavy versions. All of them have the same omnidirectionality. “Heavy” allows a maximum weight of 500 kg per drive unit. (Graphic: ebm-papst)
Integrated failsafe capability
In addition to the redundancy of the encoder systems for the steering angle and speed of the integrated motors, the complete drive system must be highly failsafe. Key values such as the MTTFd (mean time to dangerous failure) of electronic components are a must for AGV designers.

This means that transporting heavy body shells or Euro pallets, designed for a weight of up to 2 metric tons, is ideally suited to AGVs with the Heavy version. (Graphic: ebm-papst)
This is because these values inform their safety calculations just as much as the B10 values for the purely electromechanical components of the drive system, such as the brake. The B10 value indicates the nominal service life of the component at a survival probability of 90 percent. SISTEMA safety software tools use these values to determine whether the required failsafe capability of the AGV is possible with the drive system – or indeed any other installed component. ebm-papst has these important values for the ArgoDrive, such as MTTFd for the sensors and B10 for the brake, ready for AGV developers.
The high quality standards of ebm-papst ensure that the drive solution is failsafe and has a long service life. There is no need for maintenance during the ArgoDrive’s entire service life. This sets it apart from more mechanically complex drive concepts such as the Mecanum wheel, where regular cleaning and relubrication with oil are necessary, for example. In addition, the ArgoDrive’s unique design means that, unlike other omnidirectional drive units, it has no moving cables or contact points in the driving/steering system. The drive assemblies and sensors are also enclosed in the housing and are therefore not exposed to ambient conditions. This eliminates another potential cause of failure.
More than just a component supplier
Implementing the required safety measures is undoubtedly a challenge for AGV developers, so it is important that the drive solution is integrated into the overall concept as simply as possible. With the ArgoDrive, ebm-papst already offers a variety of integrated safety features that make life easier for AGV manufacturers.

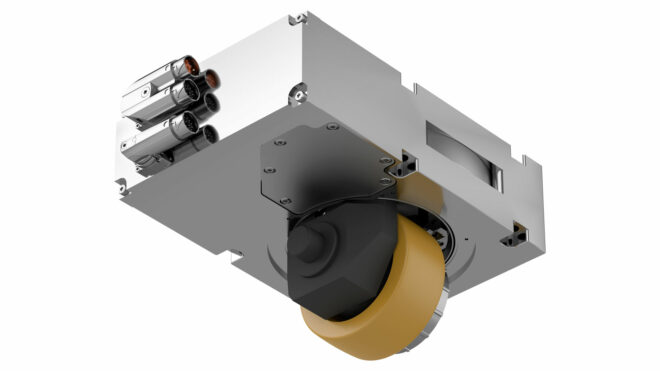
The ArgoDrive compact drive solution from ebm-papst for AGVs has an integrated safety concept. (Graphic: ebm-papst | Gernot Walter)
These include simplified installation by operating the drive with protective extra-low voltage of 48 V DC. Design constraints for drives operating at 230 V AC or higher are less of a concern, and the low voltage rating also places fewer demands on maintenance personnel. This not only reduces time and effort – thereby saving costs – but also increases failsafe capability and the safety level (protective extra-low voltage only). Another advantage of the ArgoDrive is its multiple mounting points, both at the side and on the top and bottom.
AGV manufacturers can also draw on ebm-papst’s integration experience. Indeed, the wealth of project-based know-how at the latter’s disposal means that it is well placed to provide recommendations for implementing AGV developers’ safety concepts. This applies, for example, to the readout of safety signals: what needs to be taken into account here and what pitfalls can arise with various bus systems. With the ArgoDrive, ebm-papst sees itself not only as a component supplier for the drive system, but increasingly also as a development partner for AGV manufacturers.
Leave a comment