Various drive concepts have taken root, depending on the complexity and requirements of a positioning task. The most common include AC servos, DC motors – either with brushes or no brushes with electronic commutation (BLDC) – and stepper motors. All of them have typical fields of application in which they can offer their own functional advantages.
AC servomotor or stepper motor
WHAT THE TECH?! What’s the difference between servo and stepper motors?

Does a stepper motor or a servo motor suits the needs of your application best? And what are exactly the differences between a servo motor and a stepper motor?
Find the answer here: simple, understandable and with a bit of humor!
AC servomotors are considered particularly powerful and responsive. Due to their high dynamics, they are used in rapid pick-and-place machines, for example. For many positioning tasks, their performance exceeds the requirements and the drives are therefore overpriced for these applications. Therefore, stepper motors are often used in ‘more simple’ applications. These work with either an open or closed control loop. When the control circuit is open, there is no position feedback. The motor then usually ends up being oversized to meet the torque requirements at all times and to ensure that no steps are lost.
Although this saves on sensors, users cannot clearly identify whether the motor has actually been brought to the desired position, and the oversized motors require a lot of energy. If stepper motors are in a closed control loop, i.e. with position feedback via an encoder, the torque margin can be reduced, less energy is required and the motors are able to be much smaller. However, stepper motors whose performance is adapted to the application cannot withstand overload.
They cannot work with alternating loads, e.g. when packages of different weights are transported on a conveyor belt. These drives can be absolutely the right choice for a robot or swivel arm that always grabs parts of approximately the same weight. In some areas, however, the noise that stepper motors make – and that cannot be avoided – are intolerable from an occupational safety perspective.
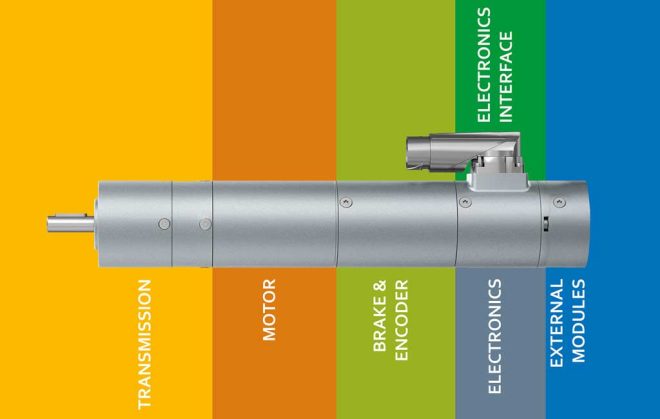
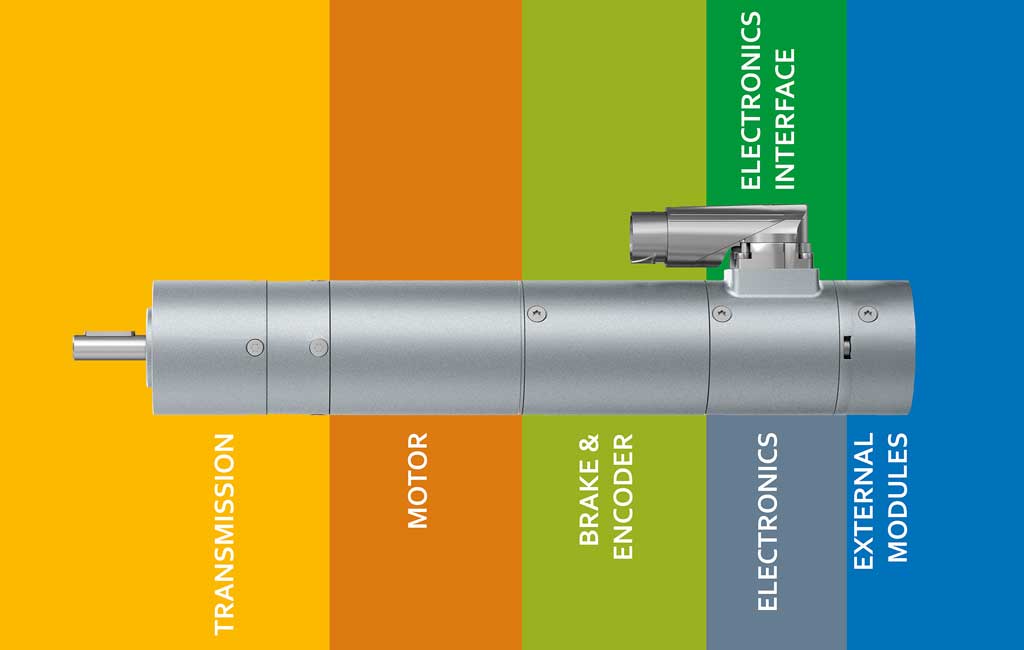
Fig. 1: Positioning drives from the modular drive system: the internal rotor motors are at the heart of this with power outputs of 30 to 750 watts. Depending on the application, they can be individually combined with control electronics and various transmission, brake, and encoder modules. (Graphic | ebm-papst)
DC servomotors from the modular drive system
DC servomotors are also frequently used in positioning applications. The electronically commutated variants experience almost no wear and are very durable. Due to the safety extra-low voltage (24 VDC or 48 VDC), there are much fewer training requirements for the personnel installing this type of drive and the user does not need to spend nearly as much effort on documentation as with the AC servomotors mentioned above. The drives are also smaller. Their positioning is much more precise than stepper motors, and they are more dynamic, extremely quiet and energy efficient. In addition, drive systems that are suitable for a wide range of positioning tasks can be found “off the shelf”, which keeps the costs of the high-performance drives down. Motor specialist ebm-papst proves this with its modular ECI drive system.

Fig. 2: Equipped with an integrated electronics module, many intelligent functions can be implemented in the drive itself; the PLC required previously is freed up or, in an ideal scenario, can be completely omitted. (Graphic | ebm-papst)
The internal rotor motors are at the heart of the series with power outputs of 30 to 750 watts (Fig. 1). Depending on the application, they can be individually combined with control electronics and various transmission, brake, and encoder modules. A lot of application expertise went into developing this modular system. The experts know what users in a wide range of sectors need, from automation technology and logistics right through to medical technology. This enables precise movements at low speeds as possible as a rapid change to a dynamic operation. The drives are highly efficient and can even be easily accommodated in confined installation conditions.
The active components (wound stator and rotor equipped with magnets) are short at only 20, 40 or, in the most powerful variant, 60 mm. Equipped with an integrated electronics module, many intelligent functions can be implemented directly in the drive (Fig. 2). The PLC required previously is freed up or can, in an ideal scenario, be completely omitted. They can be controlled with digital and analog inputs and outputs. There is nothing standing in the way of them being integrated into Industry 4.0 concepts.
Wide range of applications

Fig. 3: Workpiece carrier transportation systems are a typical application for ECI drives. They move parts quickly and efficiently in production from one assembly step to the next. (Photo | ebm-papst)
There are many typical positioning applications for ECI drives. One example is workpiece carrier transportation systems, which quickly and efficiently move parts in production from one assembly step to the next. It is important that nothing jolts or wobbles to ensure that sensitive products do not get damaged. Fig. 3 shows an application in which ECI motors with integrated electronics and worm gears have replaced the AC gear motors used previously. As a result, users can save up to 80% of energy.
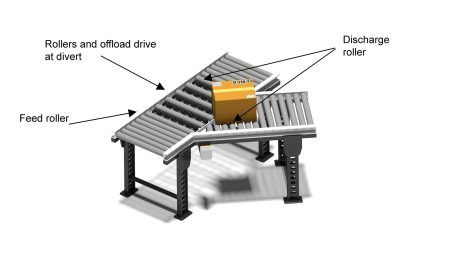
Fig. 4: The drives can be installed easily and can save space, and they can make complex pneumatic solutions at diverts or lifting equipment unnecessary. (Graphic | ebm-papst)
ECI motors also feature torque control and high overload capacity. Since the motor regulates torque and current, workpieces of different weights can be transported at constant speed. For post-sorting in large logistics centers, the compact brushless DC drives on the belts, gates and diverts have also replaced the AC motors that used to be common with their large control cabinets for controllers. ECI drives can be installed easily and can save space (Fig. 4), and they can make complex pneumatic solutions at diverts or lifting equipment unnecessary.
The industrial-grade drives are suitable for countless other positioning applications, for example in medical technology: they meet the requirements for dental chairs, which include compact dimensions, high holding force, EMC, fail-safe operation and operation with as little noise as possible (Fig. 5).

Fig. 5: The ECI motors meet the requirements for dental chairs, including compact dimensions, a high holding force and an operation that is as quiet as possible. (Graphic | ebm-papst)
And the right drive can be found quickly. Thanks to defined preferred types, selected drive configurations can be delivered within 48 hours, which means that sampling, for example, can be done very quickly.
You can configure and order our drives via the online portal.
Leave a comment