
AGVs use various movement concepts to navigate flexibly and efficiently in various applications. In intralogistics, two methods are generally used: differential or omnidirectional movement. These methods differ significantly in terms of maneuverability, space requirements and control complexity. In a differential movement, the AGV is controlled by two independently driven wheels and their speed differences. This means that the vehicle has a high degree of maneuverability and can rotate on the spot, which is particularly advantageous in tight spaces.
However, this movement requires complex control algorithms and can cause stability problems on uneven surfaces. Omnidirectional AGVs, on the other hand, can move in any direction, including sideways and diagonally, thanks to special driving steering systems. This type of movement provides maximum flexibility and enables precise navigation in confined environments. The disadvantage is higher costs and increased control effort, as several drives have to be coordinated simultaneously.
„Thanks to the ECI motors, it is currently the most compact system on the market, it is easy to integrate and is modularly designed.“
Dr. Ing. Robert Michel, Product Manager at b-drives
Differential movement
Wheel motor systems for automated guided vehicles (AGVs) must fulfil key requirements: This calls for compact solutions that can be flexibly adapted to the specific application requirements thanks to their different motorization. High load capacities are often required, as well as overload capacity when braking and accelerating. The wheel motor systems must also always guarantee reliable and safe operation and also impress with their price/performance ratio.
A successful example is the very compact eWheel developed by b-drives GmbH for bidirectional navigating vehicles with BLDC motors from ebm-papst installed. “With the eWheel, transport systems can reach their destination safely even in the tightest of spaces. Thanks to the ECI motors, it is currently the most compact system on the market, it is easy to integrate and is modularly designed,” as stated by Dr. Robert Michel, Product Manager at b-drives.

With stator lengths of 20, 40 or 60 mm, the ECI 63 motors cover the power range from 150 to 370 W. (Image | ebm-papst)

The rated output of the ECI 80 motors is up to 750 W. (Image | ebm-papst)

To ensure that the wheel motors can withstand the tough operating conditions in logistics, the actuation electronics for the two motors in the wheel motor are housed in a solid housing. Planetary gearboxes ensure the necessary reduction ratio. (Image | b-drives)
Flexible design options
The modules with two driven wheels are designed as a modular system and are available in six motor sizes, three gearbox reductions and five wheel diameters. This enables the user to choose between different lengths of 109 to 238 mm at maximum speeds of 0.7 to 3.7 m/s/ Since the torques required in the applications are also different, the modular system also offers a selection here. For example, for the smallest length, the maximum torques are between 29 and 100 Nm and the largest between 53 and 100 Nm. All versions have a high load capacity of up to 500 kg per wheel. In line with the motors, b-drives also offers a double-axle controller with up to 80 Aeff peak current, CANopen and Safe Torque Off (STO). If other bus systems such as ProfiNET or EtherCAT are desired, the corresponding individual electronics are also available for this purpose.
Modular drives
Two types of motor are used in the wheel motors: The brushless, electronically commutated ECI 63 internal rotor motor with 63 mm diameter (Fig. 3) and the larger ECI 80 with 80 mm diameter (Fig. 4). With stator lengths of 20, 40 or 60 mm, the larger ECI 63 motors cover the power range from 150 to 370 W at up to 880 mNm nominal torque and 4,000 rpm nominal speed. Their efficiency is over 90 %. The same three stator lengths are available for the ECI 80 motors; the rated output ranges from up to 750 W.
“The motors are available in safety extra-low voltage of 24 and 48 V, meaning that b-drives with motors from ebm-papst can also easily adapt the wheel motors to the relevant application at this point”, adds Steffen Schmidt, Market Manager Intralogistics at ebm-papst. Thanks to the safety extra-low voltage, the requirements for the documentation are manageable and commissioning can be simplified. The overload capacity of the motors up to three times the rated torque is also important for the application area, especially when starting up with large loads or if the AGV has to overcome bevels or unevenness.
The STO function (Safe Torque Off) integrated into the drive controller also ensures a safe stop (PLe). Holding brake and STO can also be triggered together. In addition, the speed of the drive can be reliably monitored by a suitable control system (Safe Limited Speed) and ensure that the vehicle only moves in the approved direction (SDI, Safe Direction). The motors have two independent encoder systems as standard: the integrated hall sensors for commutation and a high-resolution incremental coder for control. By comparing both signals, the electronics can reliably record the speed in a functional manner.
An alternative encoder can be used if required, e.g. a Sin/Cos encoder or a TTL or HTL incremental encoder. It is also possible to use safety functions via PROFIsafe. “The ECI motors are compatible with Simatic Micro-Drive; we can then install the corresponding encoder in the wheel module,” explains Dr Michel. The innovative, compact and versatile wheel module will open up a wide range of applications thanks to this flexibility, especially as it also impresses with its good price/performance ratio.
Omnidirectional movement
In applications where maneuverability, load capacity, dynamics or good fine positioning are required, omnidirectional vehicle concepts are usually used. Ebm-papst offers the ArgoDrive the right driving steering system including wheel. Each drive unit consists of two brushless DC motors, transmission, sensors and connection plugs. The two ECI 63 motors with a stator length of 20 mm contribute to steering, acceleration, movement or braking with a superposition gear, depending on requirements. If the wheel is aligned or no steering movement takes place, the entire power of both motors can be used for driving; this makes the ArgoDrive unique and particularly efficient. With a rated output of just 300 W for both motors, it can move loads of up to 100 kg, 300 kg or 500 kg per drive unit in the Light, Standard and Heavy versions. The infinite steering angle enables omnidirectional vehicle movement, even from a stationary position.
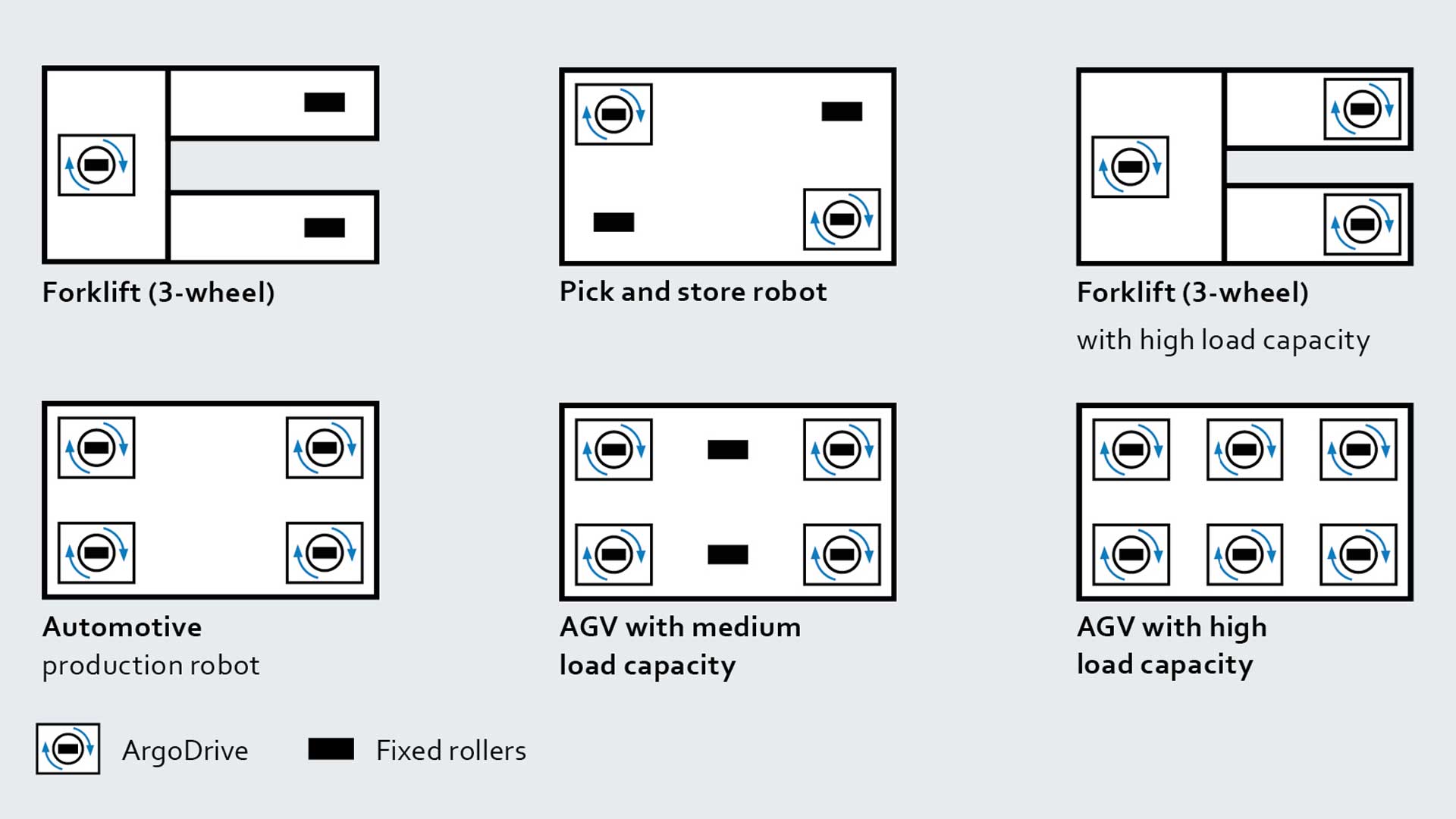
Omnidirectional movement requires at least two ArgoDrives per vehicle. This enables particularly narrow and maneuvering AGVs to be achieved with two driving steering systems arranged opposite each other and two cam rollers. The number of systems used can also be increased as required to increase the load capacity of the vehicle. With four driving steering systems and four fixed rollers, for example, loaded vehicles with a total weight of 4 t can be moved extremely dynamically, omnidirectionally and with high positioning accuracy.
Leave a comment