

Markus Weingart, Head of Department Electronics, ebm-papst Landshut
In the automotive sector, the LIN bus is a long-established communications solution for networking sensors and actuators and their control devices. In view of the success of smart home applications, the serial fieldbus system is gaining rapidly in importance in the heating sector as LIN bus communication provides a lean solution for connecting components such as pumps or gas blowers and thus making smart condensing boilers possible.
The LIN bus is a single-master, multi-slave system. The master — in a condensing boiler, the electronic controller — determines when the slave — for example, the blower — should provide data or carry out commands. This takes place at cyclical intervals according to a timetable kept in the master. This clear schedule defines which information is to flow and when. For our gas blowers, we recommend retrieving the data relevant to control systems, such as the speed, every fifty milliseconds.
Information as key
For data that do not change so often, such as temperature or power consumption, longer intervals are sufficient. For defining the schedule, that makes it important to know the data transfer time for the various information packets. This is similar to planning in production, where it is also necessary to take timing into consideration when sequencing the individual steps in a process.
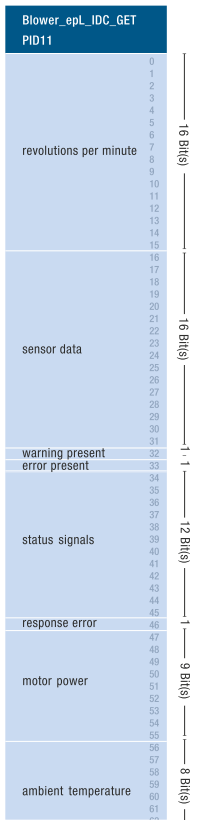
Example of a LIN message for a gas blower
How long does it take to transmit a data packet? To answer this question, it helps to take a look at the typical structure of a LIN message (see example). In the LIN bus, it may include a maximum of 64 bits. But this information is not enough to calculate the transfer time. A so-called “overhead” is also needed, because before data retrieval starts, the master sends synchronization pulses to forewarn the slave so it can adjust to the master’s clock rate.
All in order
In addition, a packet identifier (PID) is sent with a checksum for every transfer to announce the data packet’s contents and verify whether the data are transferred correctly. On top of that, a safety buffer of 40 percent is added since, as in production, sometimes a step can take longer than usual. But the production plan must not be allowed to get mixed up because of that.
The maximum data transfer time is calculated from the formula above. The term t Frame_Nom is the time required to transfer the data packet with the content information including overhead. It is calculated from the number of bytes multiplied by ten. This factor is comprised of the number of bits per byte (eight) and a start and a stop bit per byte. The number of bits in the overhead is given as 44. The parameter t bit = baud rate-1 designates the baud rate, a unit that expresses transmission speed. In a LIN bus, bit rates of 19.2 kbit per second are typical. For this value, a bit transfer time of t bit = (19.2 kbit/s)-1 = 52 μs results. So a LIN message with 64 bits has a maximum data transfer time of about nine milliseconds.
Leave a comment