
Markus Weingart, Head of Department Electronics, ebm-papst Landshut
Der LIN-Bus ist im Automobilbereich längst eine etablierte Kommunikationslösung zur Vernetzung von Sensoren und Aktoren sowie deren Steuerungsgeräten. In der Heiztechnikbranche gewinnt das serielle Feldbussystem angesichts des Erfolgs von Smart-Home-Anwendungen rasch an Bedeutung, bietet die LIN-Bus-Kommunikation doch eine schlanke Lösung, um Komponenten wie Pumpe oder Gasgebläse miteinander zu vernetzen und damit intelligente Brennwertthermen möglich zu machen.
Der LIN-Bus ist ein Single-Master-Multi-Slave-System. Der Master – bei einer Brennwerttherme die elektronische Steuerung – bestimmt, wann der Slave – zum Beispiel das Gebläse – Daten liefern oder Befehle ausführen soll. Dies erfolgt in zyklischen Zeitabständen nach einer im Master hinterlegten Zeittabelle. Dieser klare Ablaufplan definiert, wann welche Informationen fließen sollen. Bei unseren Gasgebläsen empfehlen wir, die für die Regelungstechnik relevanten Daten, wie zum Beispiel die Drehzahl, alle fünfzig Millisekunden abzurufen.
Informationen als Schlüssel
Für Daten, die sich nicht so häufig ändern, also Werte zur Temperatur oder Leistungsaufnahme, reichen größere Zeitintervalle. Für die Definition der Zeittabelle ist es daher wichtig, die Datentransferzeit der verschiedenen Informationspakete zu kennen. Vergleichbar ist das mit der Planung in der Produktion: Auch hier müssen einzelne Arbeitsschritte unter Berücksichtigung der Zeit in eine bestimmte Reihenfolge gebracht werden.
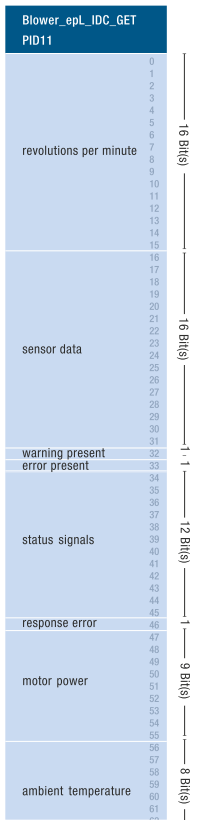
Beispiel für eine LIN-Message eines Gasgebläses.
Wie lange dauert also die Übertragung eines Datenpakets? Zur Beantwortung dieser Frage hilft ein Blick auf den typischen Aufbau einer LIN-Message (siehe Beispiel). Bei einem LIN-Bus darf sie maximal 64 Bits umfassen. Diese Information reicht jedoch nicht für die Berechnung der Transferzeit aus. Hinzu kommt noch ein sogenannter „Overhead“. Denn bevor die Datenabfrage überhaupt startet, sendet der Master Synchronisationspulse, damit der Slave vorgewarnt wird und sich auf die Taktrate des Masters einstellen kann.
Alles in Ordnung
Zudem wird bei jeder Übertragung noch ein „Packet Identifier“ (PID) zusammen mit einer Prüfsumme mitgeschickt, um den Inhalt des Datenpakets anzukündigen und zu prüfen, ob die Daten auch korrekt übertragen wurden. Darauf wird dann ein Sicherheitspuffer von 40 Prozent aufgeschlagen. Denn wie in der Produktion kann ein Arbeitsschritt auch mal länger dauern. Der Produktionsplan darf aber deshalb nicht durcheinandergeraten.
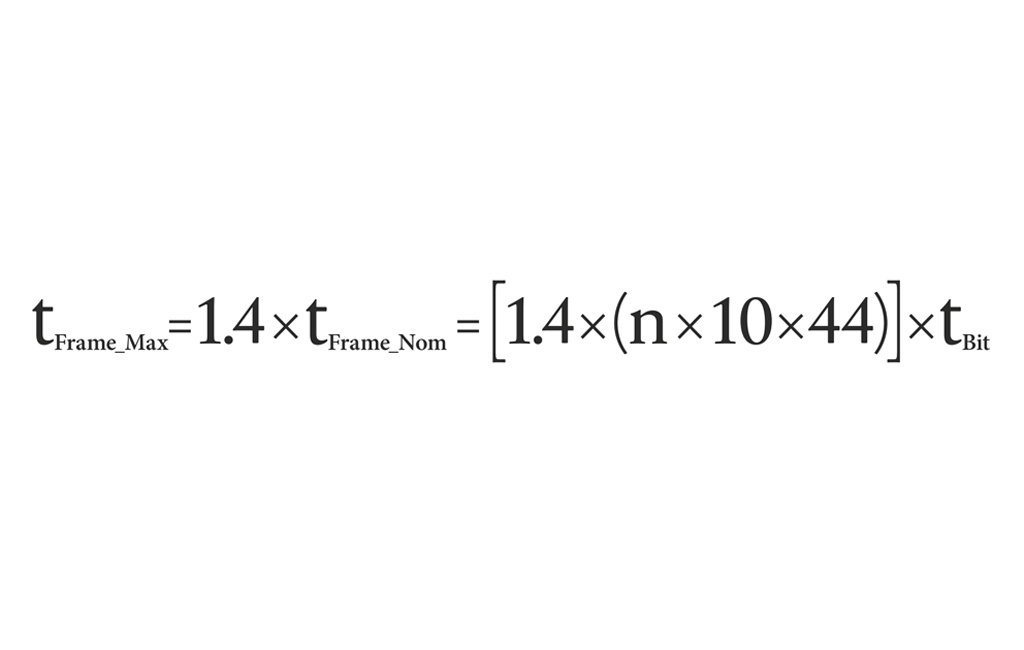
Die maximale Datentransferzeit berechnet sich nach der oben genannten Formel. Der Term t Frame_Nom bezeichnet die Zeit, die es benötigt, das Datenpaket mit den Nutzinformationen inklusive Overhead zu übertragen. Er berechnet sich aus der Anzahl der Bytes multipliziert mit dem Faktor zehn. Dieser Faktor setzt sich aus der Anzahl der Bits, die ein Byte enthält (acht), sowie jeweils einem Start- und Stopp-Bit pro Byte zusammen.
Mit 44 wird die Anzahl der Bits des Overheads angegeben. Der Parameter t bit = Baudrate-1 bezeichnet die Baudrate, eine Einheit, die die Übertragungsgeschwindigkeit ausdrückt. Bei einem LIN-Bus sind Bitraten von 19,2 kBit pro Sekunde üblich. Bei diesem Wert ergibt sich eine Bit-Transferzeit von t bit = (19,2 kBit/s)-1 = 52 µs. Eine LIN-Message mit 64 Bits hat demnach eine maximale Datentransferzeit von etwa neun Millisekunden.
Schreiben Sie einen Kommentar